
Android 12 版本中包含许多 Camera ITS 变更。本页总结了归为四个大类的变更:
重构为 Python 3
由于 Python 2.7 于 2020 年 1 月弃用,因此整个 Camera ITS 代码库都重构为 Python 3。Android 12 中需要以下 Python 版本和库:
- Python 3.7.9 或 Python 3.7.10
- OpenCV 3.4.2
- Numpy 1.19.2
- Matplotlib 3.3.2
- Scipy 1.5.2
- pySerial 3.5
- Pillow 8.1.0
- PyYAML 5.3.1
主测试启动器 tools/run_all_tests.py 与 Android 11 或更低版本相同,并已重构为 Python 3。
所有单个测试都已重构,并使用在 tests/its_base_test.py 中定义的新测试设置类。大多数测试名称和功能保持不变。在 Android 12 中,所有单个测试现在都加载其场景。虽然每个测试的场景加载都会增加总体测试时间,但它可以调试单个测试。
如需详细了解单个测试变更,请参阅测试变更。
以下 Python 模块已重构,名称已更改:
pymodules/its/caps.py→utils/camera_properties_utils.pypymodules/its/cv2image.py→utils/opencv_processing_utils.pypymodules/its/device.py→utils/its_session_utils.pypymodules/its/error.py→utils/error_util.pypymodules/its/image.py→utils/image_processing_utils.pypymodules/its/objects.py→utils/capture_request_utils.pypymodules/its/target.py→utils/target_exposure_utils.pytools/hw.py→utils/sensor_fusion_utils.py
采用 Mobly 测试框架
Mobly 是一个基于 Python 的测试框架,支持需要多台设备和自定义硬件设置的测试用例。Camera ITS 使用 Mobly 测试基础架构,以便更好地控制和记录测试。
Camera ITS 使用 Mobly 测试基础架构,以便更好地控制和记录测试。Mobly 是一个基于 Python 的测试框架,支持需要多台设备和自定义硬件设置的测试用例。如需详细了解 Mobly,请参阅 google/mobly。
config.yml 文件
借助 Mobly 框架,您可以在 its_base_test 类中设置被测设备 (DUT) 和图表平板电脑。config.yml (YAML) 文件用于创建 Mobly 测试平台。可以在此配置文件中配置多个测试平台,例如,平板电脑和传感器融合测试平台。在每个测试平台的控制器部分中,您可以指定 device_ids 以标识要用于测试运行程序的相应 Android 设备。除了设备 ID 之外,其他参数(例如平板电脑 brightness、chart_distance、debug_mode、camera_id 和 scene_id)也会在测试类中传递。常用测试参数值包括:
brightness: 192 (all tablets except Pixel C)
chart_distance: 31.0 (rev1/rev1a box for FoV < 90° cameras)
chart_distance: 22.0 (rev2 test rig for FoV > 90° cameras)
基于平板电脑的测试
对于基于平板电脑的测试,关键字 TABLET 必须存在于测试平台名称中。在初始化期间,Mobly 测试运行程序会初始化 TestParams 并将其传递给各个测试。
以下是基于平板电脑的运行的 config.yml 文件示例。
TestBeds:
- Name: TEST_BED_TABLET_SCENES
# Test configuration for scenes[0:4, 6, _change]
Controllers:
AndroidDevice:
- serial: 8A9X0NS5Z
label: dut
- serial: 5B16001229
label: tablet
TestParams:
brightness: 192
chart_distance: 22.0
debug_mode: "False"
chart_loc_arg: ""
camera: 0
scene: <scene-name> # if <scene-name> runs all scenes
可以使用 tools/run_all_tests.py 调用测试平台。如果不存在命令行值,则测试将使用 config.yml 文件值运行。此外,您可以使用类似于 Android 11 或更低版本的命令,在命令行中替换 camera 和 scene 配置文件值。
例如:
python tools/run_all_tests.py
python tools/run_all_tests.py camera=1
python tools/run_all_tests.py scenes=2,1,0
python tools/run_all_tests.py camera=1 scenes=2,1,0
传感器融合测试
对于传感器融合测试,测试平台名称必须包含关键字 SENSOR_FUSION。正确的测试平台由测试的场景确定。Android 12 同时支持 Arduino 和 Canakit 传感器融合控制器。
以下是传感器融合运行的 config.yml 文件示例。
Testbeds
- Name: TEST_BED_SENSOR_FUSION
# Test configuration for sensor_fusion/test_sensor_fusion.py
Controllers:
AndroidDevice:
- serial: 8A9X0NS5Z
label: dut
TestParams:
fps: 30
img_size: 640,480
test_length: 7
debug_mode: "False"
chart_distance: 25
rotator_cntl: arduino # cntl can be arduino or canakit
rotator_ch: 1
camera: 0
要使用传感器融合测试装置运行传感器融合测试,请使用:
python tools/run_all_tests.py scenes=sensor_fusion
python tools/run_all_tests.py scenes=sensor_fusion camera=0
多个测试平台
可以在配置文件中包含多个测试平台。最常见的组合是同时具有平板电脑测试平台和传感器融合测试平台。
以下是包含平板电脑和传感器融合测试平台的 config.yml 文件示例。
Testbeds
- Name: TEST_BED_TABLET_SCENES
# Test configuration for scenes[0:4, 6, _change]
Controllers:
AndroidDevice:
- serial: 8A9X0NS5Z
label: dut
- serial: 5B16001229
label: tablet
TestParams:
brightness: 192
chart_distance: 22.0
debug_mode: "False"
chart_loc_arg: ""
camera: 0
scene: <scene-name> # if <scene-name> runs all scenes
- Name: TEST_BED_SENSOR_FUSION
# Test configuration for sensor_fusion/test_sensor_fusion.py
Controllers:
AndroidDevice:
- serial: 8A9X0NS5Z
label: dut
TestParams:
fps: 30
img_size: 640,480
test_length: 7
debug_mode: "False"
chart_distance: 25
rotator_cntl: arduino # cntl can be arduino or canakit
rotator_ch: 1
camera: 0
手动测试
Android 12 继续支持手动测试。但是,测试平台必须使用关键字 MANUAL 在测试平台名称中将测试标识为手动测试。此外,测试平台不能包含平板电脑 ID。
以下是手动测试的 config.yml 文件示例。
TestBeds:
- Name: TEST_BED_MANUAL
Controllers:
AndroidDevice:
- serial: 8A9X0NS5Z
label: dut
TestParams:
debug_mode: "False"
chart_distance: 31.0
camera: 0
scene: scene1
没有平板电脑的测试场景
场景 0 和场景 5 的测试可以使用 TEST_BED_TABLET_SCENES 或 TEST_BED_MANUAL 完成。但是,如果使用 TEST_BED_TABLET_SCENES 进行测试,则即使不使用平板电脑,也必须连接平板电脑,并且平板电脑序列号必须有效,因为测试类设置会为平板电脑分配序列号值。
运行单个测试
只能出于调试目的运行单个测试,因为其结果不会报告给 CTS 验证程序。由于无法在命令行中为 camera 和 scene 覆盖 config.yml 文件,因此这些参数在相关单个测试的 config.yml 文件中必须正确。此外,如果配置文件中有多个测试平台,则必须使用 --test_bed 标志指定测试平台。例如:
python tests/scene1_1/test_black_white.py --config config.yml --test_bed TEST_BED_TABLET_SCENES
测试工件
在 Android 12 中,Camera ITS 的测试工件存储方式与 Android 11 或更低版本类似,但有以下变更:
- 测试工件
/tmp目录在 8 个字符的随机字符串前添加了CameraITS_前缀,以提高清晰度。 - 测试输出和错误存储在每个测试的
test_log.DEBUG中,而不是test_name_stdout.txt和test_name_stderr.txt中。 - 来自每个单独测试的 DUT 和平板电脑 logcat 都存储在
/tmp/CameraITS_########目录中,简化了调试,因为调试 3A 问题所需的所有信息都已记录。
测试变更
在 Android 12 中,平板电脑场景是 PNG 文件,而不是 PDF 文件。使用 PNG 文件使更多平板电脑型号能够正确显示场景。
scene0/test_jitter.py
test_jitter 测试在 Android 12 中的物理隐藏摄像头上运行。
scene1_1/test_black_white.py
对于 Android 12,test_black_white 具有 test_black_white 和 test_channel_saturation 的功能。
下表介绍了 Android 11 中的两个单独测试。
| 测试名称 | 首次 API 级别 | 断言 |
|---|---|---|
| scene1_1/test_black_white.py | 全部 | 短曝光、低增益 RGB 值 ~[0, 0, 0] 长曝光、高增益 RGB 值 ~[255, 255, 255] |
| scene1_1/test_channel_saturation.py | 29 | 降低了 [255, 255, 255] 差异的容差,以消除白色图像中的色偏。 |
下表介绍了 Android 12 中合并的测试 scene1_1/test_black_white.py。
| 测试名称 | 首次 API 级别 | 断言 |
|---|---|---|
| scene1_1/test_black_white.py | 全部 | 短曝光、低增益 RGB 值 ~[0, 0, 0] 长曝光、高增益 RGB 值 ~[255, 255, 255],并降低了值之间的容差,以消除白色图像中的色偏。 |
scene1_1/test_burst_sameness_manual.py
test_burst_sameness_manual 测试在 Android 12 中的物理隐藏摄像头上运行。
scene1_2/test_tonemap_sequence.py
test_tonemap_sequence 测试在 Android 12 中的 LIMITED 摄像头上运行。
scene1_2/test_yuv_plus_raw.py
test_yuv_plus_raw 测试在 Android 12 中的物理隐藏摄像头上运行。
scene2_a/test_format_combos.py
test_format_combos 测试在 Android 12 中的 LIMITED 摄像头上运行。
scene3/test_flip_mirror.py
test_flip_mirror 测试在 Android 12 中的 LIMITED 摄像头上运行。
scene4/test_aspect_ratio_and_crop.py
在 Android 12 中,重构了在 scene4/test_aspect_ratio_and_crop.py 中查找圆形的方法。
早期的 Android 版本使用一种方法,该方法涉及在父轮廓(正方形)内查找子轮廓(圆形),并使用尺寸和颜色过滤器。Android 12 使用一种方法,该方法涉及查找所有轮廓,然后通过查找最像圆形的特征进行过滤。为了滤除显示屏上的伪圆形,对最小轮廓区域有要求,并且圆形的轮廓必须为黑色。
下图显示了轮廓及其选择标准。
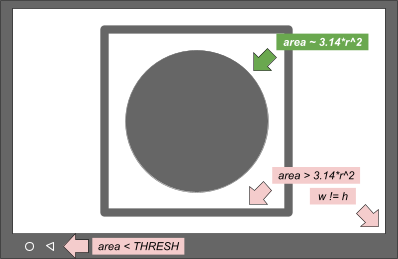
图 1. 轮廓和选择标准的概念图
Android 12 方法更简单,可解决某些显示平板电脑中边界框剪裁的问题。所有圆形候选对象都记录下来以进行调试。
在 Android 12 中,裁剪测试针对 FULL 和 LEVEL3 设备运行。Android 11 或更低版本跳过了 FULL 设备的裁剪测试断言。
下表列出了与给定设备级别和首次 API 级别对应的 test_aspect_ratio_and_crop.py 的断言。
| 设备级别 | 首次 API 级别 | 断言 |
|---|---|---|
| LIMITED | 全部 | 纵横比 4:3、16:9、2:1 格式的 FoV |
| FULL | < 31 | 纵横比 4:3、16:9、2:1 格式的 FoV |
| FULL | ≥ 31 | 裁剪 纵横比 4:3、16:9、2:1 格式的 FoV |
| LEVEL3 | 全部 | 裁剪 纵横比 4:3、16:9、2:1 格式的 FoV |
scene4/test_multi_camera_alignment.py
重构了 scene4/test_multi_camera_alignment.py 中 YUV 捕获的 undo_zoom() 方法,以更准确地考虑传感器上与捕获纵横比不匹配的裁剪。
Android 11 Python 2 代码
zoom_ratio = min(1.0 * yuv_w / cr_w, 1.0 * yuv_h / cr_h)
circle[i]['x'] = cr['left'] + circle[i]['x'] / zoom_ratio
circle[i]['y'] = cr['top'] + circle[i]['y'] / zoom_ratio
circle[i]['r'] = circle[i]['r'] / zoom_ratio
Android 12 Python 3 代码
yuv_aspect = yuv_w / yuv_h
relative_aspect = yuv_aspect / (cr_w/cr_h)
if relative_aspect > 1:
zoom_ratio = yuv_w / cr_w
yuv_x = 0
yuv_y = (cr_h - cr_w / yuv_aspect) / 2
else:
zoom_ratio = yuv_h / cr_h
yuv_x = (cr_w - cr_h * yuv_aspect) / 2
yuv_y = 0
circle['x'] = cr['left'] + yuv_x + circle['x'] / zoom_ratio
circle['y'] = cr['top'] + yuv_y + circle['y'] / zoom_ratio
circle['r'] = circle['r'] / zoom_ratio
sensor_fusion/test_sensor_fusion.py
在 Android 12 中,为传感器融合测试添加了一种检测图像中特征的方法。
在低于 Android 12 的版本中,整个图像用于查找最佳 240 个特征,然后将这些特征屏蔽到中心 20%,以避免滚动快门效应,最低特征要求为 30 个特征。
如果此方法找到的特征不足,Android 12 会先将特征检测区域屏蔽到中心 20%,并将最大特征数限制为最低特征要求的两倍。
下图显示了 Android 11 和 Android 12 特征检测之间的差异。提高最低特征要求阈值会导致检测到质量较差的特征,并对测量产生负面影响。
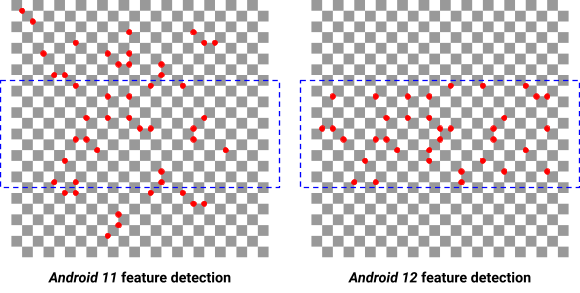
图 2. Android 11 和 Android 12 之间的特征检测差异
新测试
scene0/test_solid_color_test_pattern.py
Android 12 启用了新测试 test_solid_color_test_pattern。此测试适用于所有摄像头,如下表所述。
| 场景 | 测试名称 | 首次 API 级别 | 描述 |
|---|---|---|---|
| 0 | test_solid_color_test_pattern | 31 | 确认纯色图像输出和图像颜色可编程性。 |
必须启用纯色测试图案才能支持相机隐私模式。test_solid_color_test_pattern 测试确认纯色 YUV 图像输出,颜色由选定的图案定义,并且图像颜色根据规范变化。
参数
cameraPrivacyModeSupport:确定相机是否支持隐私模式。android.sensor.testPatternMode:设置测试图案模式。此测试使用SOLID_COLOR。android.sensor.testPatternData:为测试图案模式设置 R、Gr、Gb、G 测试图案值。
如需了解纯色测试图案的说明,请参阅 SENSOR_TEST_PATTERN_MODE_SOLID_COLOR。
方法
捕获为设置的参数的 YUV 帧,并验证图像内容。测试图案直接从图像传感器输出,因此不需要特定场景。如果支持 PER_FRAME_CONTROL,则为每个测试的设置捕获单个 YUV 帧。如果不支持 PER_FRAME_CONTROL,则捕获四个帧,并且仅分析最后一个帧,以最大限度地提高 LIMITED 摄像头中的测试覆盖率。
YUV 捕获设置为完全饱和的 BLACK、WHITE、RED、GREEN 和 BLUE 测试图案。由于测试图案定义是每个传感器拜耳图案,因此必须为每种颜色设置颜色通道,如下表所示。
| 颜色 | testPatternData (RGGB) |
|---|---|
| BLACK |
(0, 0, 0, 0)
|
| WHITE |
(1, 1, 1, 1)
|
| RED |
(1, 0, 0, 0)
|
| GREEN |
(0, 1, 1, 0)
|
| BLUE |
(0, 0, 0, 1)
|
断言表
下表介绍了 test_solid_color_test_pattern.py 的测试断言。
| 相机 首次 API 级别 |
相机类型 | 断言的颜色 |
|---|---|---|
| 31 | Bayer | BLACK、WHITE、RED、GREEN、BLUE |
| 31 | MONO | BLACK、WHITE |
| < 31 | Bayer/MONO | BLACK |
性能等级测试
scene2_c/test_camera_launch_perf_class.py
验证前置和后置主摄像头的相机启动时间是否少于 500 毫秒(使用 scene2_c 人脸场景)。
scene2_c/test_jpeg_capture_perf_class.py
验证前置和后置主摄像头的 1080p JPEG 捕获延迟是否少于 1 秒(使用 scene2_c 人脸场景)。